Le module Import regroupe les actions de chargement de structures : création d'un bloc initial à partir d'un nuage, ouverture d'un fichier JSON, détection automatique de blocs et import depuis un CSV externe.
C'est typiquement le premier onglet utilisé en début de session.
Disponibilité des actions
Certaines actions sont conditionnées par la licence WIBU :
Détecter les blocs dans un nuage n'apparaît que si le bit
BlockFinder est actif dans la Feature Map du client.
Charger un bloc initial¶
Crée un bloc d'amorçage ancré sur le nuage de points actuellement sélectionné dans CloudCompare. Ce bloc sert de référence pour les opérations ultérieures (positionnement, recalage manuel, etc.).
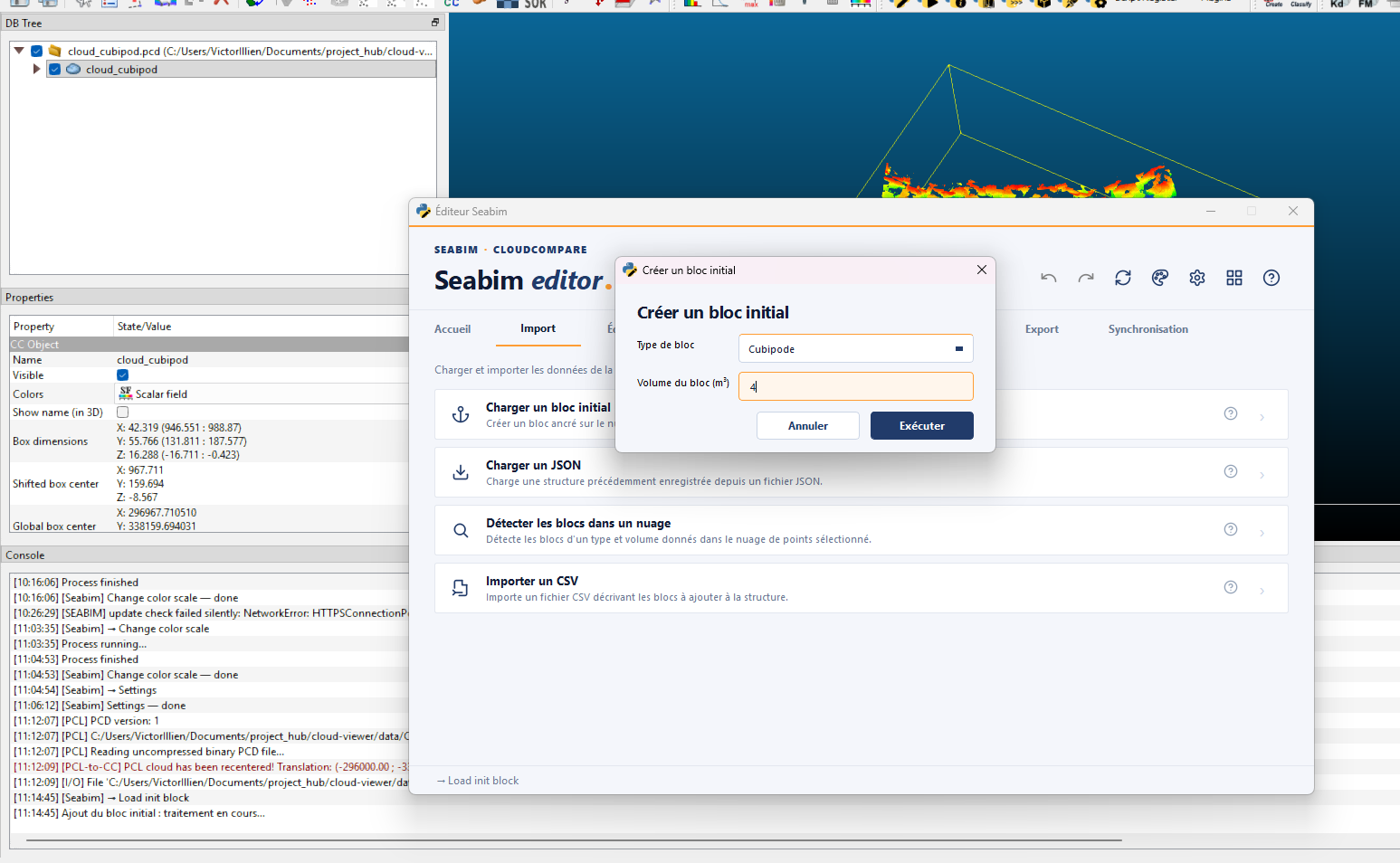
Utiliser cette action quand on travaille sans détection automatique :
on positionne d'abord un bloc unique sur le nuage, puis on duplique et
recale chaque bloc voisin un à un via Aider le recalage et
Recaler la sélection - Distance adaptative.
C'est aussi l'action utilisée pour démarrer un projet sans licence BlockFinder : on construit la structure manuellement à partir d'un seul bloc de référence.
Charger un JSON¶
Ouvre un fichier de structure JSON précédemment sauvegardé (voir
Sauvegarder un JSON).
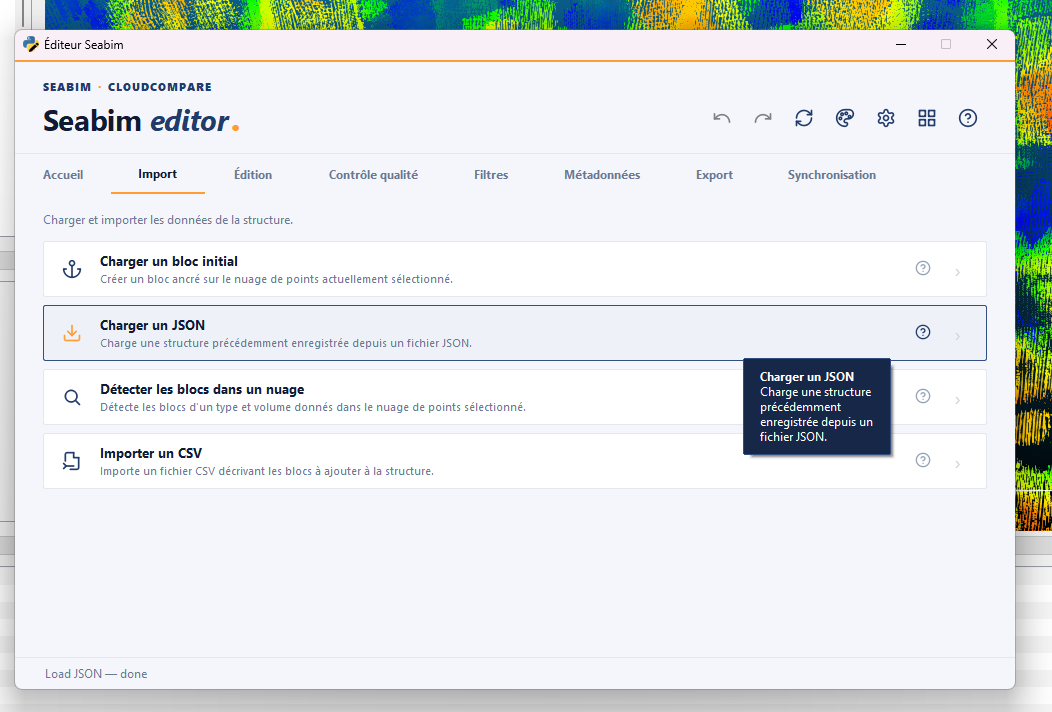
C'est l'action utilisée pour reprendre un projet : on récupère le
dernier JSON livré (suffixe _find, _filtered, _manual_n selon le
jalon — cf. Nomenclature des structures)
et on continue le travail là où il s'était arrêté.
Sauvegarde automatique
Si la session précédente s'est mal terminée (crash CloudCompare,
extinction brutale), le launcher conserve un autosave.json dans le
dossier de données utilisateur. Charger ce fichier permet de
récupérer le dernier état avant l'incident.
Détecter les blocs dans un nuage¶
Détecte automatiquement les blocs d'un type et d'un volume donnés dans
le nuage de points sélectionné. La structure produite peut ensuite être
nettoyée via Filtrer les blocs et affinée par
Recaler la sélection - Distance adaptative.
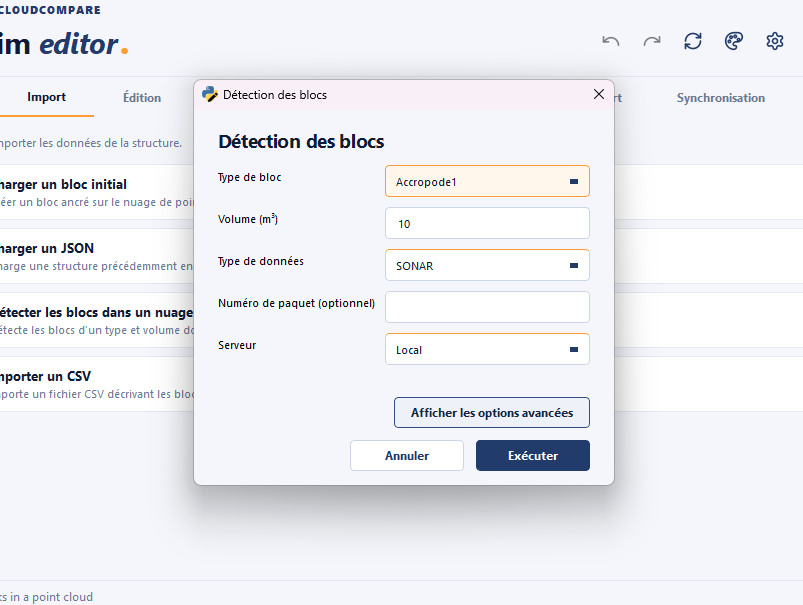
C'est le point d'entrée du workflow de reconstruction automatique décrit dans la procédure courante § Reconstruction automatique. Plusieurs détections peuvent tourner en parallèle dans des fenêtres CloudCompare distinctes pour traiter différentes zones simultanément.
!!! tip "Bonnes pratiques de détection" - Lancer la détection sur un nuage découpé en zones de 500 m
maximum (cf. découpage des nuages)
pour limiter le temps de calcul et faciliter le traitement par lots. - Toujours appliquer un Filtrer les blocs juste après la détection pour éliminer les faux positifs avant le recalage manuel.
Action gardée par licence
Cette action n'est disponible que si la licence du poste inclut le feature BlockFinder. En l'absence de ce droit, le bouton n'apparaît pas dans l'onglet Import.
Importer un CSV¶
Importe un fichier CSV décrivant les blocs à ajouter à la structure.
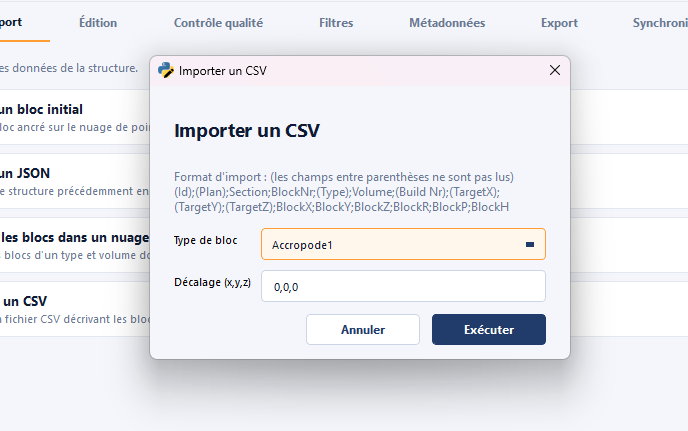
Utile pour injecter une liste de positions issue d'un outil externe (plan de pose théorique, export d'un autre logiciel, fichier produit par un script métier) sans repasser par la détection automatique. Les blocs créés sont placés aux positions du CSV ; leur recalage fin sur le nuage reste à faire via le module Édition.
La modale d'import facilite la lecture de fichiers hétérogènes :
- Choix du séparateur :
Auto(détection automatique),,,;ou tabulation. Le modeAutoanalyse les premières lignes pour deviner le bon séparateur. - Aperçu interprété : les premières lignes du fichier sont affichées telles qu'elles seront lues, pour vérifier le découpage en colonnes avant de valider.
- Offset automatique : pour de grandes coordonnées (UTM par exemple), un offset est proposé pour ramener les positions dans une plage exploitable.
Format du CSV
Le CSV attend une ligne par bloc et 16 colonnes dans l'ordre
Id;Plan;Section;BlockNr;Type;Volume;…;BlockR;BlockP;BlockH. Le format
précis est documenté côté Formats de fichiers § Fichiers
CSV.